For our teardown of the Anki Vector Robot, we were joined in the studio by Leanne Cushing, captain of Team Valkyrie on Battlebots.
Anki’s Vector Robot, released in late 2018, was designed to listen and respond to its user, interact with its surroundings, recognize people and objects, and avoid obstacles. When released, the robot sold for $249.99, with extra accessories for $29.99.
The product was meant to be a must-have robot pal for every home; however, at the end of April 2019, Anki announced it had ceased product development and robot manufacturing, and all their assets were auctioned off in June.
In our teardown, we wanted to explore the design of this friendly robot and examine the variety of materials and manufacturing processes that went into making this product. We also hoped to gain some insight into why Anki might have had to shut down.
Here are the features of interest we’re drilling into for this teardown:
1. Head assembly
2. Array of plastic parts
3. Design for Assembly

Head Assembly

The head assembly is made up of several plastic injection molded parts, drive motors, and an electrical interaction component.

The head assembly consists of parts made of three different plastics (PC, ABS, PC/ABS), all with different colors and textures. Some of these molds would have needed to be fairly complex to account for the small gear teeth and other features.

The interaction assembly consists of a screen that’s used as Vector’s face, a microphone array, and a speaker.

The gears in the gearboxes were extremely small and had custom numbers of gear teeth, so it’s likely that these were molded rather than purchased. The molds for these parts would have to have been micro-machined to allow for that much detail on such a small part.
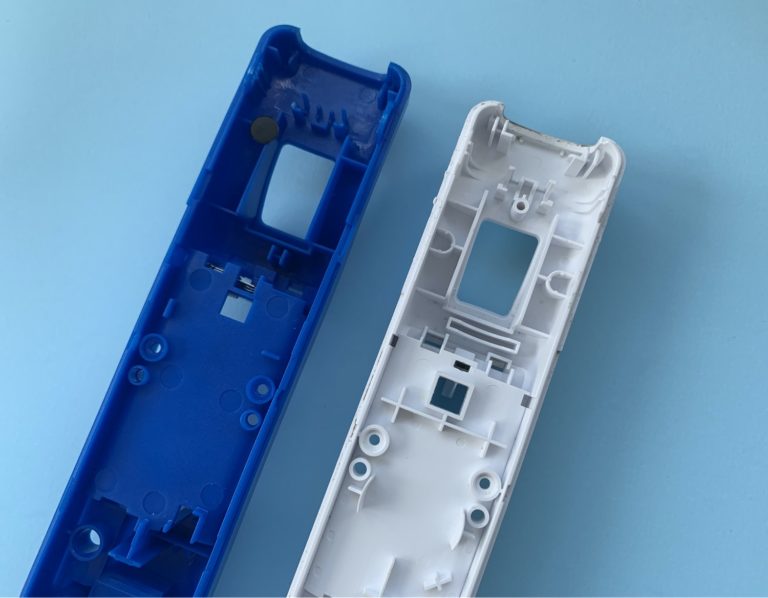
Array of Plastic Parts

Looking at Vector’s cube, we can see that this part has rubber corners that are molded into the part. This would have required an overmolding step, along with an additional material, which would have further added to the cost.

While the drive arms may seem simple, the two are quite different.

Rather than being simple mirrored parts, the right arm contains several internal gear teeth and a locking mechanism to attach the arm to the robot.

The inside of the drive wheel reveals a 45-tooth internal gear that is used to drive the robot. This small part would have needed a fairly complicated mold, which would have needed micromachining to achieve the detail found in that part.

The power button is a good example of another overmolded part that used two different materials in two different colors.

The body chassis is a good example of the complexity of the plastic parts used in Vector. Parts like this would have required complex molds to achieve some of the shapes seen in the image above.
Design for Assembly

The Vector has a unique petting feature that causes the robot to “purr” when pet by its owner.

The wire has to be soldered to the board on one end, threaded through the plastic piece and glued in place, and then threaded back through onto the board to be soldered on the other end. This process is acceptable for prototyping and very low-volume production; however, it is not scalable when making hundreds or even thousands of these robots.

The main board has wiring issues similar to the petting feature. The colored wires leaving the board are threaded through a special plastic piece that requires the wires to be threaded through prior to soldering and attaching the plug at the end.

This threading process is not unlike threading a needle and therefore requires a fair amount of manual labor, which is again not a scalable process.
Main Takeaways
Prior to the teardown, we believed that the main cost driver in the Vector would be the electronics, due to the complexity of the product and what it claimed to be able to do. However, upon opening up the robot, we noticed the vast amount and complexity of the plastic injection molded parts. We counted roughly 40 plastic parts, which would have likely needed around 30 unique (and very complex) molds. Some of these parts had features, such as gear teeth and overmolds, that would have caused these molds to become a significant cost driver. These parts were likely found to be effective in prototyping but were presumably not designed for mass manufacturing.
Many parts of this product required heavy amounts of manual labor, making it difficult and sometimes impossible to automate. It is unclear how many units Anki produced, but the product itself was not designed for mass assembly. If a large number of units were produced, the cost of the molds were likely accounted for, but the manual assembly would have cost a notable amount of time and money. If a smaller amount of units were produced, the manual assembly would have been manageable, compared to the high cost of the injection molds required. Overall, this product seemed overengineered and highly complicated for the few simple tasks Vector could complete. The high cost of production, combined with the relatively low price for the product, may have contributed to the company’s struggles.